03-02 - Project 3D Coordinates#
The following example shows how to use the project command for image batches. It will calculate for all images the projection of coordinates and return if wanted only the one with valid projections.
Here we use the same image batch as already created in example 03-01 - Footprint of Images
# -----------------------------------------------------------------------
# Copyright 2026 Martin Wieser
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# -----------------------------------------------------------------------
# Importing
import csv
from collections.abc import Mapping
from pathlib import Path
import numpy as np
from pyproj import CRS
from pyproj import network as pyproj_network
from weitsicht import (
CameraOpenCVPerspective,
ImageBase,
ImageBatch,
ImagePerspective,
MappingRaster,
Rotation,
)
DATA_DIR = Path(__file__).parent.resolve() / "data" / "ariel_flight"
pyproj_network.set_network_enabled(True) # type: ignore
# Austrian Lambert with Vertical Datum GHA (Austrian Heights)
crs_mapper = CRS("EPSG:31287+5778")
mapper_raster = MappingRaster(
raster_path=DATA_DIR / "dtm_epsg31287plus5778.tif",
crs=crs_mapper,
preload_full_raster=True,
)
# Camera Model
camera_right = CameraOpenCVPerspective(
width=11664,
height=8750,
fx=9524.786,
fy=9524.788,
cx=5811.896,
cy=4422.312,
k1=1.598e-02,
k2=-7.004e-02,
k3=1.940e-02,
k4=6.022e-03,
p1=1.016e-05,
p2=1.284e-05,
)
camera_left = CameraOpenCVPerspective(
width=11664,
height=8750,
fx=9520.292,
fy=9520.292,
cx=5850.933,
cy=4375.201,
k1=1.523e-02,
k2=-6.958e-02,
k3=1.942e-02,
k4=5.851e-03,
p1=-8.637e-05,
p2=3.504e-05,
)
# Parse images from CSV
image_crs = CRS("EPSG:25833").to_3d()
# so type checker are not complaining that we are assigning ImageBase children to image_dict
image_dict: Mapping[str, ImageBase] = {}
# Images from the right camera
with open(DATA_DIR / "eor_camera_right.csv", newline="") as csvfile:
reader = csv.DictReader(csvfile)
for row in reader:
pos = np.array([float(row["Easting"]), float(row["Northing"]), float(row["Height"])])
rot = Rotation.from_opk_degree(
omega=float(row["Omega[deg]"]),
phi=float(row["Phi[deg]"]),
kappa=float(row["Kappa[deg]"]),
)
# Add the image to the dictionary which is used for the image batch
image_dict[row["Filename"]] = ImagePerspective(
width=11664,
height=8750,
camera=camera_right,
position=pos,
orientation=rot,
crs=image_crs,
)
# Images from the left camera
with open(DATA_DIR / "eor_camera_left.csv", newline="") as csvfile:
reader = csv.DictReader(csvfile)
for row in reader:
pos = np.array([float(row["Easting"]), float(row["Northing"]), float(row["Height"])])
rot = Rotation.from_opk_degree(
omega=float(row["Omega[deg]"]),
phi=float(row["Phi[deg]"]),
kappa=float(row["Kappa[deg]"]),
)
# Add the image to the dictionary which is used for the image batch
image_dict[row["Filename"]] = ImagePerspective(
width=11664,
height=8750,
camera=camera_left,
position=pos,
orientation=rot,
crs=image_crs,
)
# ImageBatch Class
images = ImageBatch(image_dict, mapper=mapper_raster._georef_array)
Map Points#
The following line should be mapped. The mapped coordinates are used to find projections in images.

# The polygon which should be mapped
image = images["P0009912_r4_cam1.jpg"]
mapping_result = image.map_points(np.array([[5206.7, 4710.90], [5222.9, 4713.08], [5228.6, 4680.8], [5213.5, 4677.5]]))
# The mapped points
# 605026.2651450455 5313215.714125282 244.3974141243806
# 605025.9598270534 5313215.665212166 244.39450832003422
# 605026.0423648828 5313215.07452552 244.3979704470261
# 605026.334220204 5313215.098463252 244.40098045267362
Project coordinates on images#
if mapping_result.ok is False:
raise ArithmeticError("Points could not be mapped")
print("Normals (valid):", mapping_result.normals[mapping_result.mask])
if mapping_result.gsd_per_point is not None:
print("GSD per point (valid):", mapping_result.gsd_per_point[mapping_result.mask])
result_projection = images.project(mapping_result.coordinates, crs_s=CRS("EPSG:25833").to_3d(), only_valid=True)
if result_projection is not None:
print("Projection on image P0009078_r1_cam1")
if result_projection["P0009078_r1_cam1.jpg"].ok is True:
print(result_projection["P0009078_r1_cam1.jpg"].pixels)
assert result_projection is not None # for testing
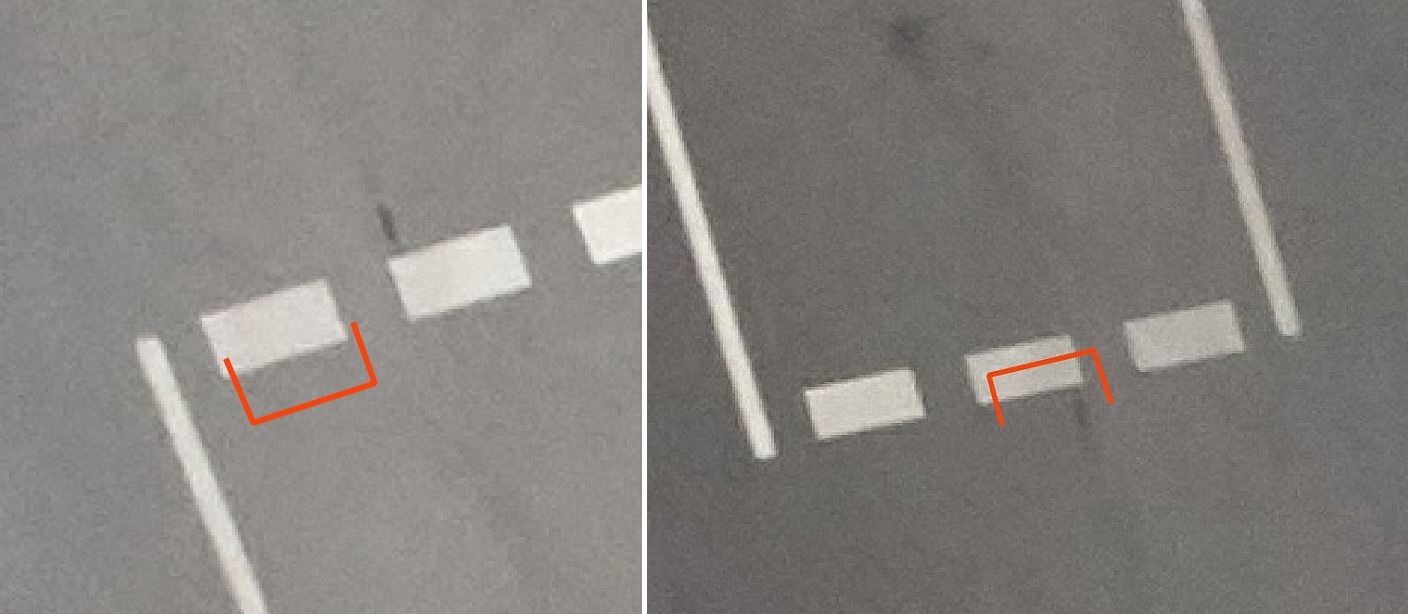
The projected coordinates for two images P0009077, P0009093.
Note
That examples exterior orientation is directly logged from an INS(IMU/GNSS). No bundle adjustment was performed to optimize EOR or IOR (from pre-calibration)